


















More Dexterity, More Possibilities
|
|
4 Foot Pressure Sensor
Accurate access to foot support information more reliable, efficient and convenient
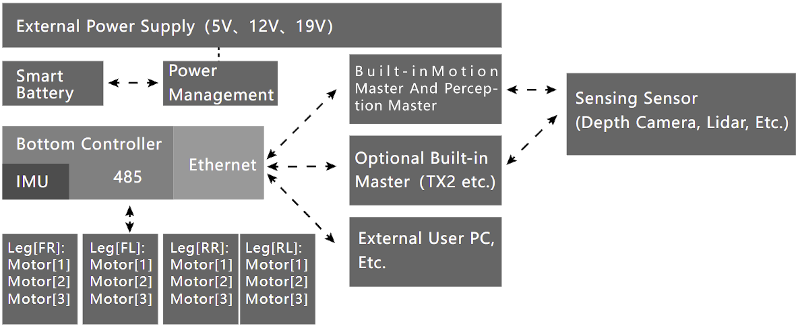
Multiple External Interfaces
HDMI x2, Ethernet Portx2, USB 3.0x4
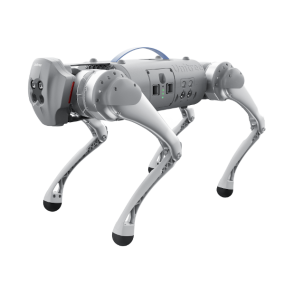
Electric Motor
Payload: 5kg
Endurance Time: 1-2.5h
2 Real Time Operating Systems
3 Protection Modes
Multi Eye Intelligent Depth Camera
Higher Running Speed
Excellent Motion Stability
Patented Power System
| Function / Specification | A1 Motor | Comparable Competitors1 |
| Maximun torque | 33.5 N·m | about 18 N·m |
| Weight | 605g | 480 ~ 550g |
| Joint Angular Acceleration Feedback | Equipped | No |
| Torque / Weight Ratio | 55.37 N·m/kg | 37.5 ~ 32.73 N·m/kg |
| Encoder Resolution | 15bit | 14bit |
| Output Bearing Reliability | Large size reliable industrial cross roller bearings. | Conventional thin wall bearings, which are fragile after falling or under axial impacts. |
Patented Body Structure and Layout
Patented Sensitive foot contact
Vision-based Autonomous Object Tracking
Vision-based Autonomous Obstacle Avoidance
Choose To Assemble High Precision Lidar
Friendly User Interface
Outstanding Software and Hardware Reliability
4 other products in the same category:

Unitree AlienGo Depth perception vision system High explosive sports performance Adaptive complex terrain Long battery life & heavy load Rich external interface All-in-one body Advanced...

Unitree Go1 Go wherever you will go Light and Compact Weight ≈ 12kgSize (Folded): 0.588*0.29*0.22m HIGH PERFORMANCE Max Speed ≈ 4.7m/s (17Km/h) INTELLIGENT SIDE-FOLLOW SYSTEM Adopt...
Unitree Go1 Edu Go wherever you will go Light and Compact Weight ≈ 12kgSize (Folded): 0.588*0.29*0.22m HIGH PERFORMANCE Max Speed ≈ 4.7m/s (17Km/h) INTELLIGENT SIDE-FOLLOW SYSTEM Adopt...


SPOT® Explorer Spot Explorer is designed for developers eager to explore how flexible mobile robots can be adapted for tasks ranging from industrial inspection to entertainment. Spot comes ready to...
error Your review appreciation cannot be sent